Train Control Systems, Electrification, and Automation: Considering the Near Future of Railroading
by Jeff Tuzik
Understanding and improving wheel/rail interaction requires unwavering attention to the little details that can have a big effect. It’s what we do here at Interface Journal and what we talk about at the annual Wheel/Rail Interaction conferences that we participate in. But every now and then, it’s good to lift the nose from the grindstone, take a look at the bigger picture, and surmise the North American rail freight industry of the near future will look like. We asked C. Tyler Dick, Assistant Professor in the Department of Civil, Architectural, and Environmental Engineering, at the Texas Railway Analysis and Innovation Node at the University of Texas, Austin—someone who spends a fair share of his professional waking hours devoted to the subject to give us an informed vision.

For many years, the clear trend has been toward longer trains, higher tonnage, a focus on maximum efficiency. These trends are likely to continue. But a confluence of technologies and practices encompassing train control and signal blocking, electric and alternative-fuel locomotives, and automated train operations may give rise to another trend—one that favors fleets of short trains operating with high frequency and low headways. A system like this might be able to grow into markets traditionally occupied by the trucking industry, and perhaps beyond that.
The greatest arguments in favor of rail freight has always been its efficiency and productivity; it has traditionally been the most efficient form of overland transportation and shipping available, C. Tyler Dick told delegates at the 2025 Wheel/Rail Interaction Heavy Haul Conference. But this historical dominance has been eroded over time by the chief competitor of rail freight: the trucking industry. “There’s been tremendous investment over the past several decades in making trucks more aerodynamic and energy efficient, and in lowering emissions,” he said. “It’s become a much steeper competition.” As autonomous/driverless technologies mature—indeed, autonomous trucks are already in revenue service testing on some highway corridors—the competition will continue to heat up.
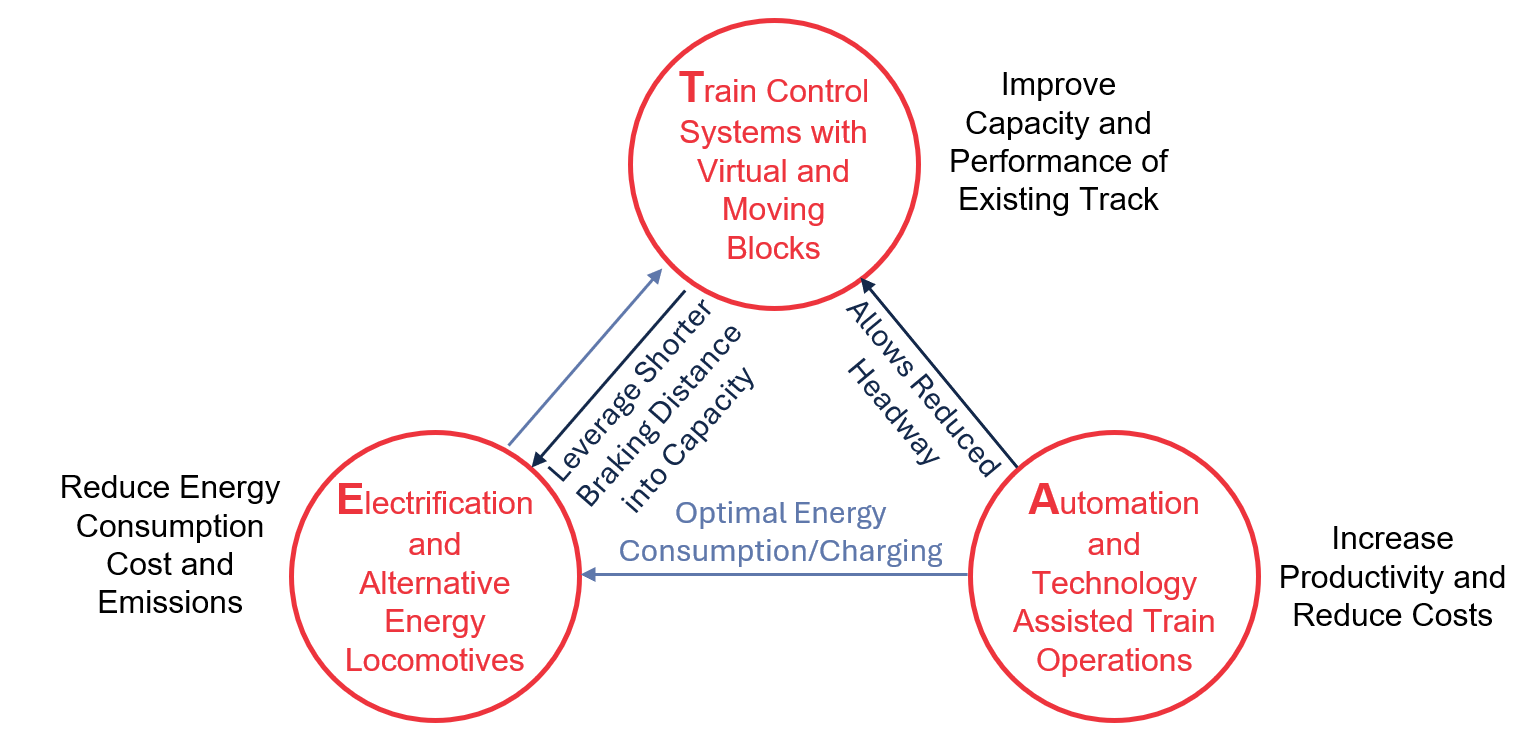
These competitive woes are coupled with the realities of a shifting growth market, one that is turning away from long-haul bulk commodities (where railroads excel) and toward carload and short-haul domestic intermodal freight, Dick said. For railroads to capitalize on this market, trains have to be able to operate, in a sense, more like trucks—emphasizing frequent, reliable service and less overall terminal time. And this is only possible to do by embracing a nexus of interlinked and mutually-supportive technologies and practices of the sort represented by the so-called Train Control, Electrification, and Automation (or TEA) Nexus (see Figure 1).
Such a pivot is no easy task. Railroads have spent decades developing infrastructure and operations in support of longer trains which maximize the inherent efficiency of the railroad system and thus reduce costs, Dick said. The reliable, frequent, short-train operations required to capture the carload/short-haul market are opposite to the trend railroads have been following since the early 1990’s when Precision Scheduled Railroading (PSR) was introduced—and particularly in the last decade, he said.
Short, frequent trains also pose inherent challenges from a logistics and operational perspective. Short trains take up more track capacity per volume of freight, they’re less energy efficient (than long trains), and they reduce train crew productivity—each engine crew is responsible for a smaller volume of freight, thus requiring more crews. “Make no mistake, there are a lot of headwinds out there against trying to capture some of the trucking market,” Dick said. But there are solutions, too.
Train Control and Signal Blocks
The TEA Nexus is a framework for leveraging new and emerging technologies to create nimble short-haul operations that can outcompete the trucking industry. Train control systems with virtual/moving blocks can improve the capacity of existing track, bypassing the need for additional capital expenditure. Electric and alternative energy locomotives can improve energy efficiency and reduce both emissions and costs. Automation and technology-assisted train operations can increase crew productivity, Dick said. “These aren’t new or theoretical technologies. They’ve been around a while, and each offers its own benefits and ROI. But implementing these technologies all together has the potential to compound all these benefits.”
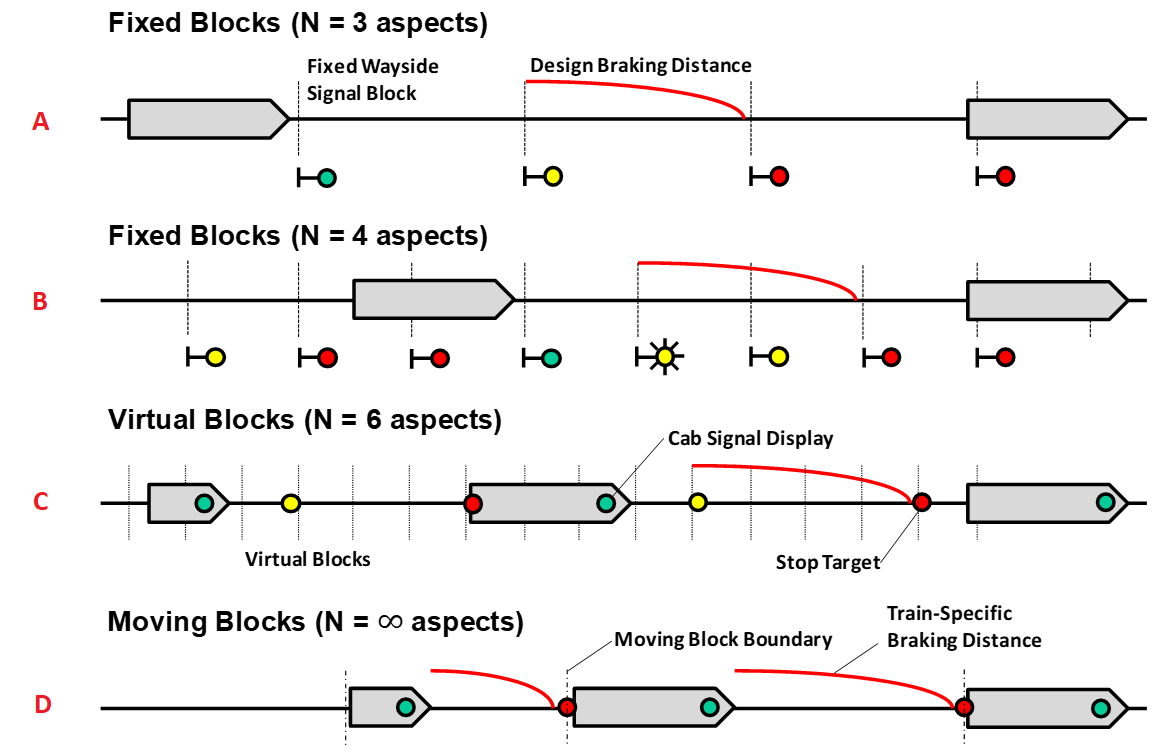
Traditionally, increasing track capacity means investing in infrastructure. This includes upgrading track to increase gross railcar weight and payload capacity, increasing the train length—which works against the aim of shorter, more frequent trains—constructing new passing sidings and/or double track sections. But track capacity can also be increased by leveraging positive train control (PTC), data and communications networks, and GPS data. Figure 2 (A), for example, shows a diagram of a traditional fixed block control system. In this case, one train follows another with a fixed distance based on braking distance. The following train must always be separated from the lead train by the combined distances between the clear signal (green), the approach signal (yellow), the stop signal (red), and a buffer around the lead train and occupied block. “If you want to run shorter trains, you still have to abide by this system, meaning you have three times the amount of separation that you actually need, based on braking distance,” Dick said.
Fixed blocks can be made smaller by adding intermediate signals (see Figure 2 [B]) which allow the following train to trail the lead train more closely without encroaching on the intermediate approach signal block. In this example, the braking distance hasn’t changed, it simply spans two signal blocks rather than one. Figure 2 (C) shows a diagram of a virtual block system. Such a system does away with real-world signals, but the blocks are nonetheless fixed in place; blocks are instead based on GPS location data and can, theoretically, be as small as is feasible and practical based on GPS accuracy and operational needs, Dick said.
Figure 2 (D) illustrates a moving block system. Here, the track is not divided into static blocks at all. Instead, each block is defined by each vehicle’s braking distance. “This allows us to drastically increase train density and track capacity, simply by better utilizing the track infrastructure.”
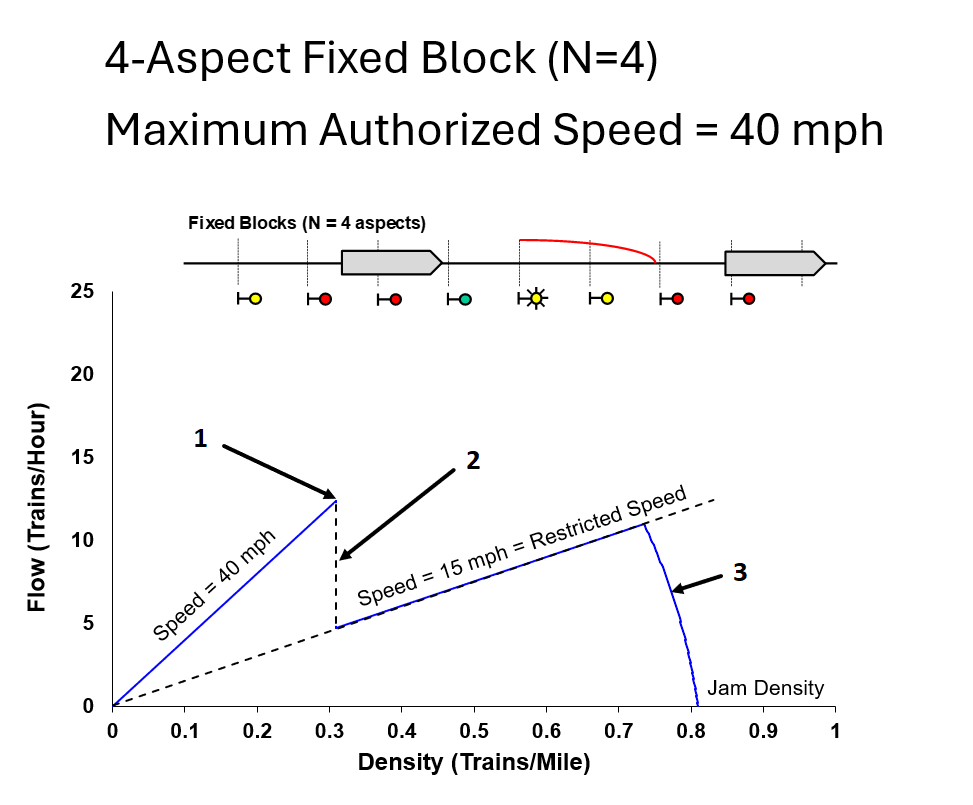
The Texas Railway Analysis and Innovation Node (TRAIN) at the University of Texas at Austin has done research on the effects of various signal block schemata on the relationship between train flow (trains per hour) and density (trains per mile). Figure 3 shows this relationship for a 4-aspect fixed block (the clear, intermediate-approach, approach, and stop signal blocks are the four aspects).
Moving from left to right, the first arrow represents the maximum density and flow rate based on minimum headway (which, in turn, is based on block aspect), Dick said. Increasing density beyond this point causes the distance between trains to fall below the signal aspect distance (i.e. signal blocks are encroached). But these are fixed blocks (in this case) and therefore such encroachment is not operationally possible; in order to increase density, trains must travel at a lower speed (a speed consistent with the signal block aspect and distance). This drop is indicated by the second arrow. Train density can be increased at this lower speed until, once again, they butt up against their safe braking distance (the third arrow). At this point, braking distance dictates an increasing speed reduction as density increases until flow rate eventually drops to zero; each train is effectively stuck in place directly behind the stop signal block of the train in front of it.
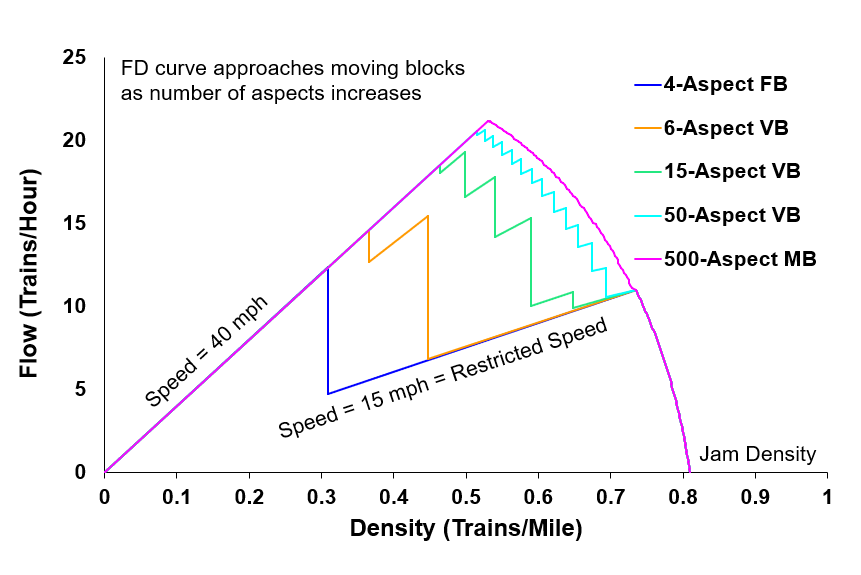
Figure 4 illustrates how flow and density are affected by increasing the number of signal blocks. Each color on the graph corresponds to different number of virtual blocks or aspects. The peak continues to increase (higher flow and higher density) with the addition of signal blocks until it behaves exactly as a moving block system, Dick said. This is represented by the pink arc.
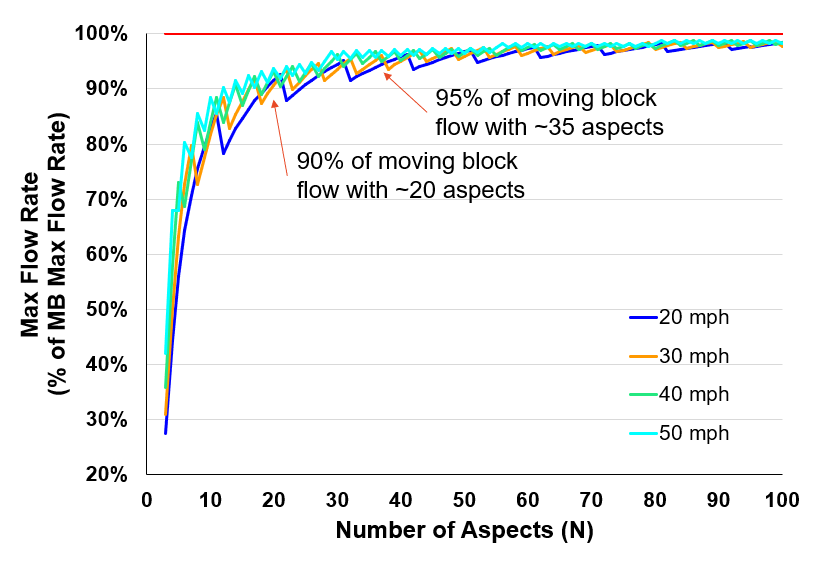
Proving out the theoretical benefits of implementing a moving block system is one thing, putting such a system into practice is another. There are significant technological and operational challenges to implementing a true moving block system, but there is also a workaround. “Instead, we looked into how many virtual blocks you’d need in order to realize the practical benefits of a moving block system,” Dick said. Figure 5 shows calculated maximum flow rate at various track speeds versus the number of virtual blocks/aspects in the system. “Twenty virtual blocks gives you about ninety percent of the true moving block benefit. Thirty-five blocks gives you about ninety-five percent of the benefit. There’s a clear point of diminishing returns.”
It appears that a high-density virtual block system provides very similar benefits to a much more complicated and difficult-to-implement moving block system. But the TRAIN analysis makes several assumptions—most importantly, it assumes each train can very closely follow the train in front of it at the precise minimum headway. “But this introduces the ‘Train Following Problem’ of how to closely follow another train without constant, abrupt throttle and brake inputs,” Dick said. Without a proper control system in place, small perturbations in following distance (such as sudden braking and acceleration) can ripple through the entire fleet and cause the flow rate to fall dramatically. This is made more challenging by the fact that freight trains have a very low power-to-weight ratio; in other words, they’re very unresponsive.
A platoon of trains moving through a series of virtual moving blocks requires stable, predictable, and gentle application of throttle and braking. Unfortunately, humans are very bad at doing this, Dick said. Any traffic jam well illustrates the point. “Manual control will simply never be able to achieve the type of fine control necessary to take advantage of a high-density virtual block or moving block operation.”
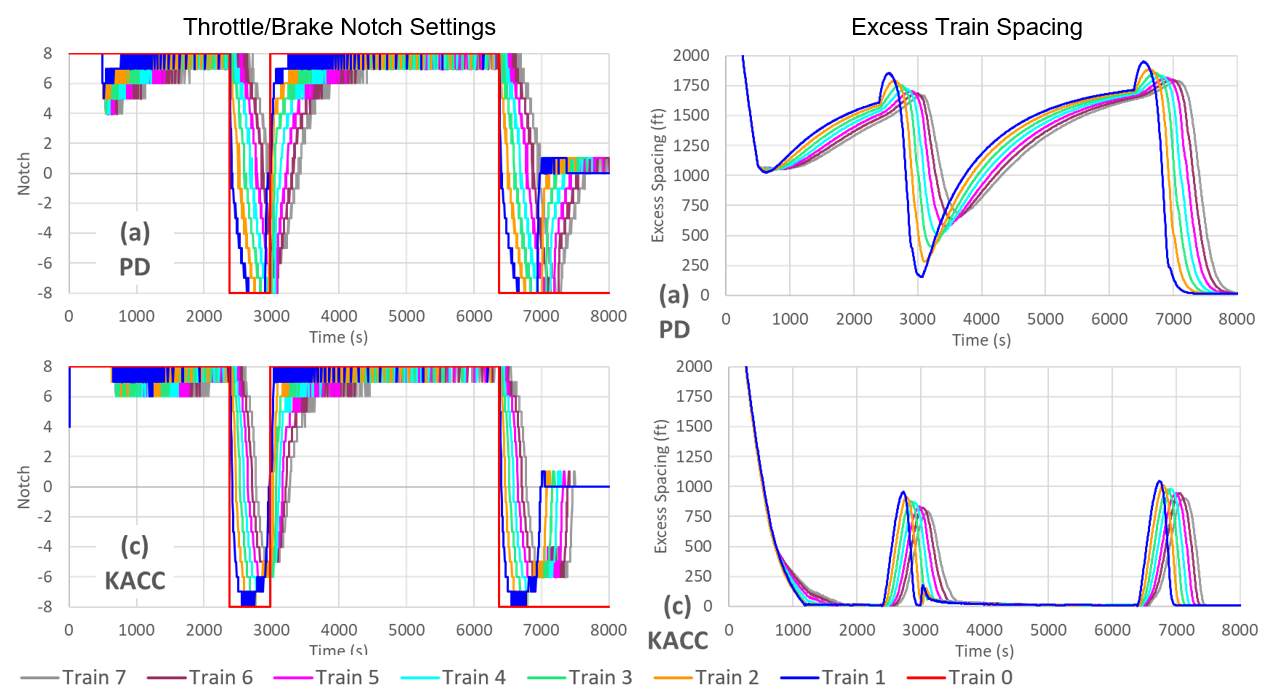
Figure 6 shows data from data from simulations of an 8-train platoon attempting to move down the track at the minimum safe following distance. The lead train is on a fixed throttle and braking pattern. Each left/right chart pair corresponds to different manual control laws (systems that translate driver inputs into vehicle motion)—Proportional Derivative (PD) is on the top, and Kinematic Adaptive Cruise Control (KACC) is on the bottom). The left graphs show throttle and brake settings over time, while the right graphs show excess train spacing over time. “We found that no matter what we did with those control laws, we couldn’t get excess spacing down to zero. And any excess space beyond the minimum safe braking distance is eroding the benefit of using a moving block system in the first place.” This means that, even in the best-case scenario, the moving block system will operate at ≈10% to ≈5% less capacity than is theoretically possible.
There may be ways around this obstacle, too.
Electrification, Alternative Energy and Automation
According to the simulation data, optimal train operations on virtual and moving block systems are hampered by a combination of the inherent unresponsiveness of diesel-electric locomotives and inherent deficits in manual control. Alternative energy locomotives, particularly battery and electric technologies could solve the first problem, Dick said.
Hydrogen fuel cell, battery-powered, and electrified locomotives are much more responsive than their diesel-electric counterparts, and they offer more finite throttle and braking controls, Dick said. “Power is available on demand, without the spin-up of the engine, making it much easier to dial in the subtle adjustments needed to maintain minimum headways.” The fine throttle control and instantly available power of non-combustion locomotives also run up against the limitations of manual control. Realizing these benefits requires pairing with automatic or technology-assisted train control, he said.
Fully automated heavy-haul operations are not over the horizon somewhere, they’re here. Rio Tinto has operated a 500-mile-long driverless, automated mine-to-port railway in Western Australia’s Pilbara region since 2019. There are caveats, of course. The train operates in a largely unpopulated area, there are very few grade crossings, train makeup and lading never changes, and others. Nonetheless, the success of the project has proven that autonomous operation can provide “increased capacity and efficiency through consistent train speed and reduced headway,” Dick said.
This neatly aligns with some of the requisite elements for optimal moving block operations. In North America, driver advisory systems—which suggest, but do not execute, optimal throttle and brake inputs—are in place on many railroads, but full automation (in the freight industry) may be a long time coming. Although fully automated freight train demonstrations have taken place in NA, there are many powerful regulatory, institutional, and technical barriers standing before any kind of widespread adoption of the technology.
Whether or not the TEA Nexus shifts the current rail freight paradigm, or opens new market opportunities, it nonetheless represents a suite of technologies whose implementation on the Class Is is inevitable. While the railroad industry is known for moving and adapting slowly, an evolving marketplace and rapidly changing workforce is forcing railways to change and adapt more quickly than in the past. The pace will only increase going forward.

Jeff Tuzik is Managing Editor of Interface Journal
This article is based on a presentation made at the 2025 Wheel/Rail Interaction Heavy Haul conference.
Images are courtesy of C. Tyler Dick and the University of Texas at Austin unless otherwise noted.